圖 1 是明緯使用的 PMBus
版本與速率資訊,其優缺點如下。
優點 : 公定協定、設計者好導入。
缺點 : 抗雜訊干擾能力較弱,適合短距離通訊。
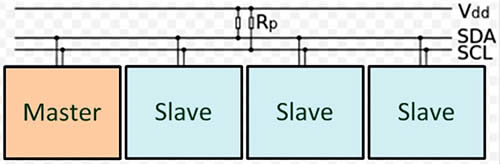
圖 1 MEAN WELL PMBus
通訊介面: SMBus 1.1;版本: PMBus 1.1;匯流排速率: 100KHz
| 南樺 電子報 378 | 出刊日期 | 2023.05.15 |
|
|
|
| PMBus/CANBus 通訊協定於智能電源應用說明 |
| 簡介 |
| 圖 1 是明緯使用的 PMBus
版本與速率資訊,其優缺點如下。 |
圖 1 MEAN WELL PMBus 通訊介面: SMBus 1.1;版本: PMBus 1.1;匯流排速率: 100KHz |
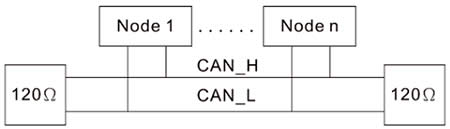
| CANBus (控制器區域網路)使用雙線差動(CANH
及 CANL)傳輸技術,原先是開發來取代複雜的汽車內部配線。但因它具備高度的抗電氣雜訊干擾及自我除錯能力,也漸漸廣泛的被使用於工業及自動化系統中
,包含電源產業等。 |
 圖 2 MEAN WELL CANBus 實體層 : 11898;資料連結層 : CAN2.0B; 應用層 : 明緯自訂;匯流排速率 : 250Kbps 固 |
| 以下列舉兩個實際案例,分別使用了PMBus與CANBus的通訊界面。 |
| |
| 此案需求多套 96kW 之高功率電源系統,使用電源系統輸出的電力驅動全固態射頻功率放大器(Radio Frequency Power Amplifier)。為配合應用最佳的用電效率,電源系統輸出電壓須能涵蓋42Vdc ~54Vdc調變範圍。DRP-3200-48CAN 支援 CANBus 通訊,支援單套系統 30 台同時上線功能並透過通訊指令達成精準調壓的要求。再者,多套電源系統間並非以並聯方式連接,且進行實驗時需要同步調整每套電源系統的匯流排電壓,欲達成同步和遠端控制,勢必要透過外部控制器與通訊協定方能達成,同時使用控制器調變之後的輸出電壓,精準度須滿足正負1%的精密要求。在此前提下,全數位化的智能電源設計加上強健抗雜訊的 CANBus 協定,讓聯網方式遠端監控電源系統變成可能。圖 4 是 96kW 高功率電源系統的實際配置圖。 |
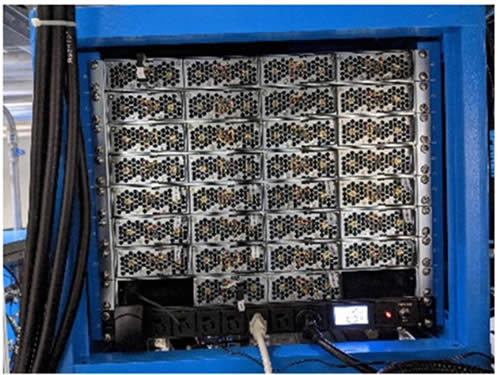 圖 4 96kW高功率電源系統 |
| 具備通訊功能的明緯可編程電源供應器不僅讓複雜的控制及監控變得簡單。機型適合使用於各種應用,包含一般性應用: RSP-1600/2000及DPU-3200、機櫃應用: RCP-1600/2000及DRP-3200與無風扇或水冷應用: UHP-1500/2500及PHP-3500/3500-HV等。具備彈性、多應用等特性,適合使用於智能控制與監控之需求應用。 |
| 總之,明緯智能電源為控制、監控和配置電源所需的應用提供
PMBus 或 CANBus 通訊協定。下表提供了兩種協定之間的詳細比較﹔ |
 |
|
• 明緯智能產品與介面有哪些? |
| PMBus : RCP-2000、RCP/RPB/RCB-1600、RSP-1600PM、DRP/DBR/DBU-3200、DPU-3200PM PHP-3500、UHP-1500/2500、HEP-1000、 HEP-2300PM、SHP-10KPM、CMU2C-P CANBus : RSP/RCP/RPB/RCB-1600CN、DPU/DRP/DBU/DBR-3200CN、PHP-3500CN UHP-1500CN/2500CN、HEP-1000CN、HEP-2300、SHP-10K、DRS-240CAN/480CAN CMU2C-C |
|
• 明緯具備 CAN bus 協定通訊之機型,最長有效通訊距離為何? |
| 明緯CAN bus符合ISO 11898、bus rate為250kbps,有效通訊距離為150m或以上。 |
|
• CANBUS/PMBUS 通訊界面線材(含長度)建議? |
|||||||||
通訊界面線材(含長度)建議請參閱下表
|
|
• PMBus與CANBus產品通訊異常,請問可以如何改善? |
||||||||||||
一般無法通訊有以下可能原因
:
|
|
• 如何提升CAN bus 的信賴度? |
因為為差動訊號,增加終端電阻於匯流排的兩側最終端可以降低訊號反射,進而提升 CAN bus 的信賴度。合適的電阻為120 ohms +/- 10 ohms及最小功率 220mw。 |
|
• 為何使用CANbus通訊時,輸出電流無法調成 0A? |
|
當使用CANbus時,該參數其實是調整輸出電流的上限保護點,並非調整輸出額定電流值。更可以把此參數當成明緯其他工控產品所具有的PC功能來理解。 |
| |